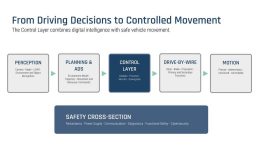
Key Takeaways: The new ADS regulations are technology-neutral but address safety across development, approval, and operation. This makes the safe implementation of digital driving decisions a distinct architectural and validation topic. Arnold NextG describes Safety-by-Wire® and NX NextMotion as platform-independent […]








